
Scoot Safely
Scooter safety articles, scooter news, and help on buying your first scooter
Today, I’m going to get just a little bit technical, and talk about a formal system which we can use to guide every aspect of our riding. It is a system that is flexible, and can be used continually to cover everything we do while out on the road.
Although this may seem a little complicated at first, please bear with me, and you should see how a little study and application of this system will be extremely worth the effort.
Of course, what system worth its salt doesn’t come along with a mnemonic or two, right? Never wishing to disappoint, here are a couple for you:
IPSA and TUG
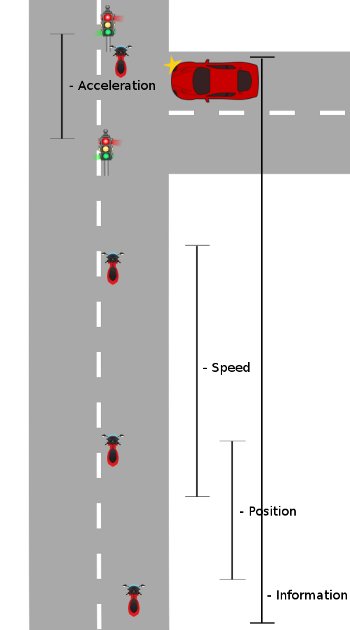
Let’s begin by looking at IPSA: It is a mnemonic to help remember the four phases of this system: Information, Position, Speed and Acceleration.

There a couple of things to note about the diagram above:
Safe riding is all about negotiating hazards. It must be noted that a “hazard” can be an immediate, pressing situation, or it could be a situation that your observation skills tell you is developing. It could also be simply making a turn or making it safely through a green light. All of these things – for our purposes – are hazards.
Before we start to put all this together, we need to look in more detail at the “Information” phase. This is itself divided into three parts:

What this means is that information is not only received and processed (such as observation, mirrors, etc…), but also given, which could be in the form of signals, sounding of the horn or flashing your lights.
So, let’s start to put all this together. When negotiating any kind of hazard, the “IPSA” system is applied:
The information phase is started. Remember that this phase continues all the time while the other phases are being processed. This phase includes good observation of the situation, making observation links (something I will cover in greater detail in later posts), seeing what the hazards and potential hazards may be, and considering signals to alert other road users of your presence and intention.
The Position phase involves making sure you are in the right position in the road to negotiate the hazard – and to ensure good visibility and view (how well others can see you and how well you can see).
The Speed phase involves adjusting your speed – if necessary – to be able to safely negotiate the hazard. For a corner, this could involve adjusting your speed to a safe one to be able to competently negotiate the bend. For passing through a green traffic light it could be adjusting your speed (downwards!) in anticipation of the lights changing to red, or a car running the light.
Note: the overriding factor that determines your speed is making sure that you always ride at a speed so that you can stop in the distance you can see to be clear.
The Acceleration phase begins when you are clearing the hazard and are smoothly accelerating to an appropriate speed to continue your journey, or it could be using the throttle to maintain your speed to offset the loss of speed due to cornering forces.
Please note that, at any stage, the information gathered through the overriding information phase could require you to re-evaluate and enter the system again at any point (for example: a vehicle could begin to pull out from the junction – forcing you to re-enter the system at the position phase and shift your position to give yourself a buffer zone).
So, after all this dry theory, let’s look at a couple of real-life examples to hopefully make things clearer:
 We are about to negotiate a hazard (left turn).
We are about to negotiate a hazard (left turn).
Looking at this example (from bottom to top):
Information is taken (assessing the situation, checking your mirrors). Information is given (a turn signal).
Position is adjusted. The rider has moved to the left of the lane in preparation of the turn.
Speed is adjusted. The rider is slowing down in preparation for the corner.
Acceleration is gently applied as the corner is negotiated, and the hazard is clearing.
Now, lets look at another. In this scenario, the rider is simply travelling through a green light:
 Information is taken and used. In this case, the lights have been green for some time – consider that they may change at any moment. The car in front is about to make a right turn.
Information is taken and used. In this case, the lights have been green for some time – consider that they may change at any moment. The car in front is about to make a right turn.
Careful observation of the situation ahead and to the sides is taken. Mirrors are checked to see what’s happening behind.
Consider giving information. If you are are not sure the driver has seen you, consider sounding your horn.
Position has been altered by moving towards the left of your lane – to give yourself a buffer zone, and to increase your visibility into the road on the right.
Speed has been adjusted by easing off the throttle in anticipation of the lights changing, or the car moving.
Acceleration begins having cleared the junction and resuming your travelling speed.
What may cause us to re-enter the system at any phase? Well, consider the first example above (the left turn). If, the driver on the left has edged just a little too far out, and you see a vehicle coming from the opposite direction which will have to move out to clear the front of the car, you re-enter the system at the position phase, and move more towards the middle of your lane to give yourself a buffer. You would then continue considering adjustments to your speed, and, of course taking, using and giving information.
So, there we have the system for Scooter control. Thanks for staying with me!
I will leave you with few scenarios which you may like to run though in your head – and while out on the road. Try to see where each phases of the system is applied. You should see that there are no instances of negotiating a hazard where this system cannot be effectively applied.
Until next time, Scoot Safely!











 I hope you find these posts useful. If you do, please consider supporting, while gaining access to all this information, and more, by purchasing: Proficient Scootering - The comprehensive guide to safe, efficient and enjoyable scooter riding. It's available for all e-readers and in print.
I hope you find these posts useful. If you do, please consider supporting, while gaining access to all this information, and more, by purchasing: Proficient Scootering - The comprehensive guide to safe, efficient and enjoyable scooter riding. It's available for all e-readers and in print.
Search
Subscribe to be notified when new content is posted
Categories
Lock Chain and Cover Your Scooter
London Fire Brigade Launches Biker Down Scheme
BMW Eyeing Future in Ride Sharing Scooters
Scoot Safely Has Completely Changed — It's the Same
Study Shows Hearing Loss From Motorcycle Riding
Vespa’s First Electric Scooter is Coming this Year!
CityScoot Raises $50 Million for its Electric Scooter Service
 Menu
Menu